
Le rêve : un chien robot qui marche.
La réalité : un chien robot qui rampe.
La leçon : construire un robot, c’est sacrément difficile.
Le Contexte
Pendant mon cursus d’Ingénierie Logicielle, j’ai eu un cours d’Arduino pour mettre en pratique nos cours d’électronique. On a vu les bases, ce qui nous a permis de monter de petits circuits et des projets simples.
Notre prof Pascal Masson (l’un des meilleurs que j’ai eus en 5 ans) a eu la brillante idée de ne mettre aucune contrainte pour le projet final.
L’imagination (et le budget) sont la seule limite.
Avec mon binôme Hugo Durand, on a décidé de voir grand :
Et si on construisait un chien robot à partir de zéro ?
C’est parti pour 8 mois de folie, d’itérations, d’échecs, de réussites, de fils fondus, de condensateurs explosés et de moteurs grillés.
J’écris cet article en mai 2025 alors que le robot a été construit début 2022. Le but n’est pas d’expliquer le pas-à-pas, mais de partager les grandes étapes. Pour les détails techniques, Hugo a écrit un super blog sur Instructables.
Cet article a aussi été publié sur Medium.
L’Aventure
Les pattes
Tout a commencé par des croquis griffonnés dans les marges pendant des cours de maths pas très passionnants.
Ça a évolué en un modèle magnifique en carton autour de servomoteurs. (qui ne correspond pas exactement aux dessins ci-dessus)

Avec un peu de modélisation et d’impression 3D, on a eu notre toute première patte !
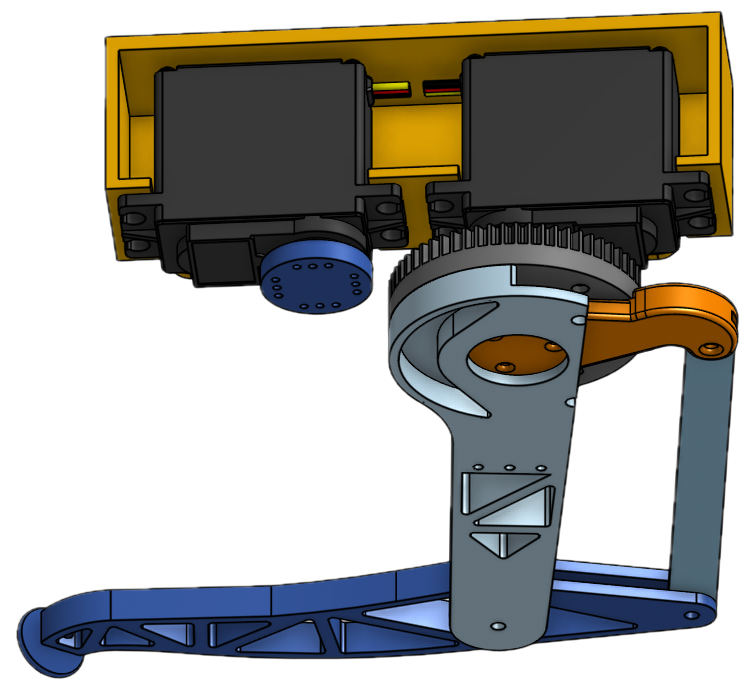

Une fois le modèle 3D dans la vraie vie, on a pu commencer à jouer avec les moteurs grâce à des potentiomètres et notre fidèle Arduino.
Place à l’automatisation. On est loin de la démarche d’un chien, mais ça commence à ressembler à quelque chose !
Spoiler : on n’a jamais implémenté d’algorithme de marche adaptatif, on a fini par coder des mouvements manuels en dur.
PolyDog v0
Il s’appelle PolyDog parce qu’on était étudiants à Polytech Nice Sophia.
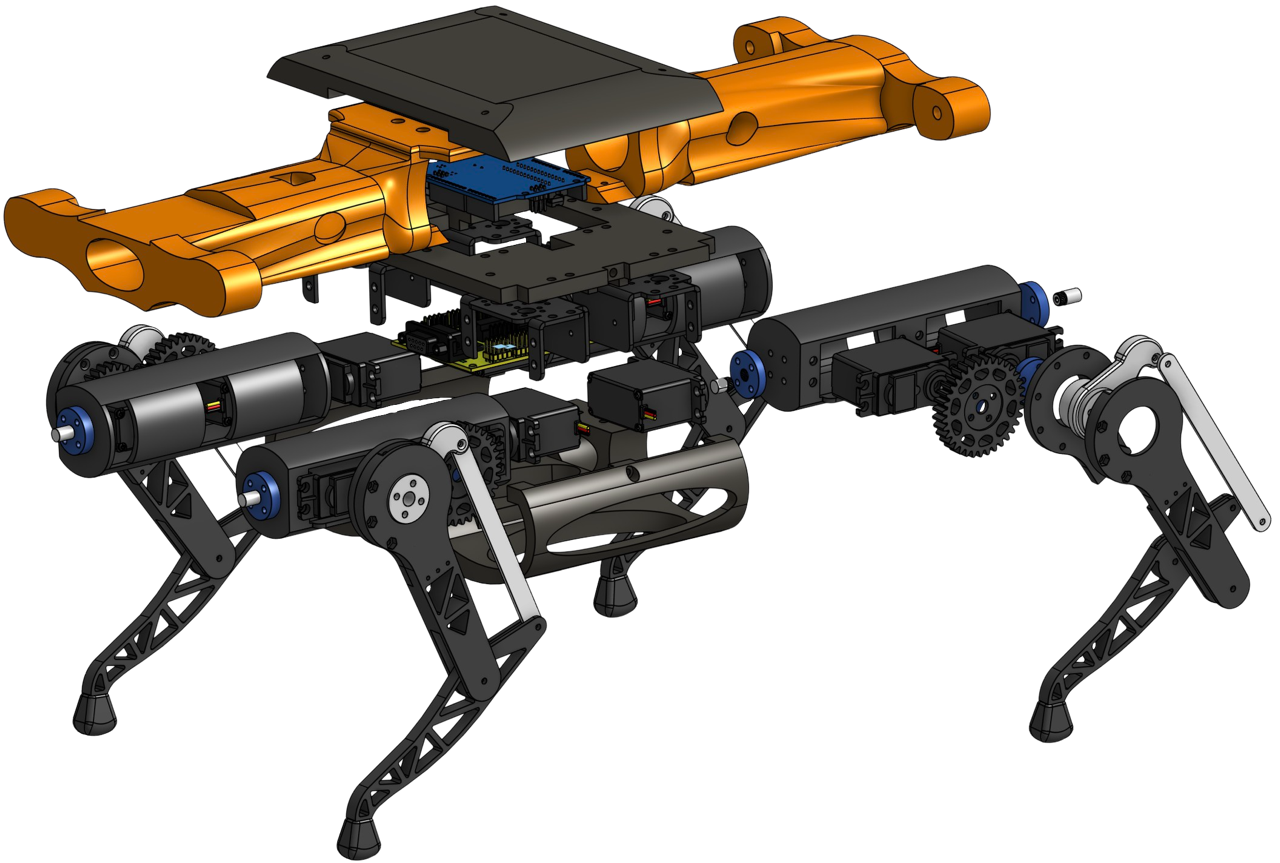
On avait modélisé un corps plutôt sympa, mais on a commencé avec du contreplaqué pour itérer plus vite, moins cher, et plus léger.

Ensuite, impression 3D des 4 pattes et tadaaa !

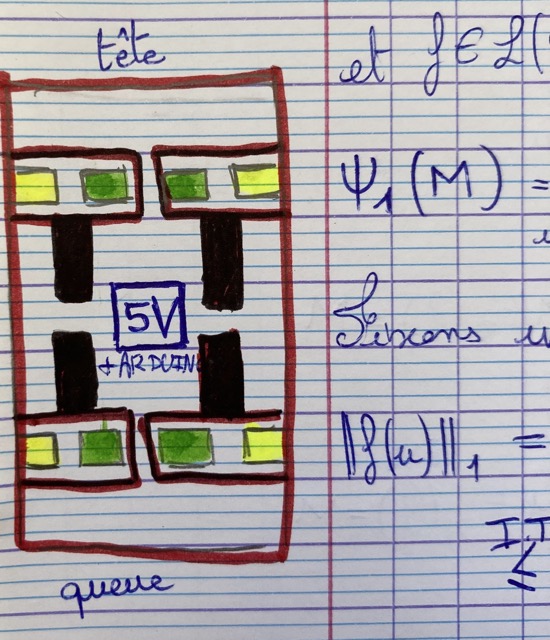
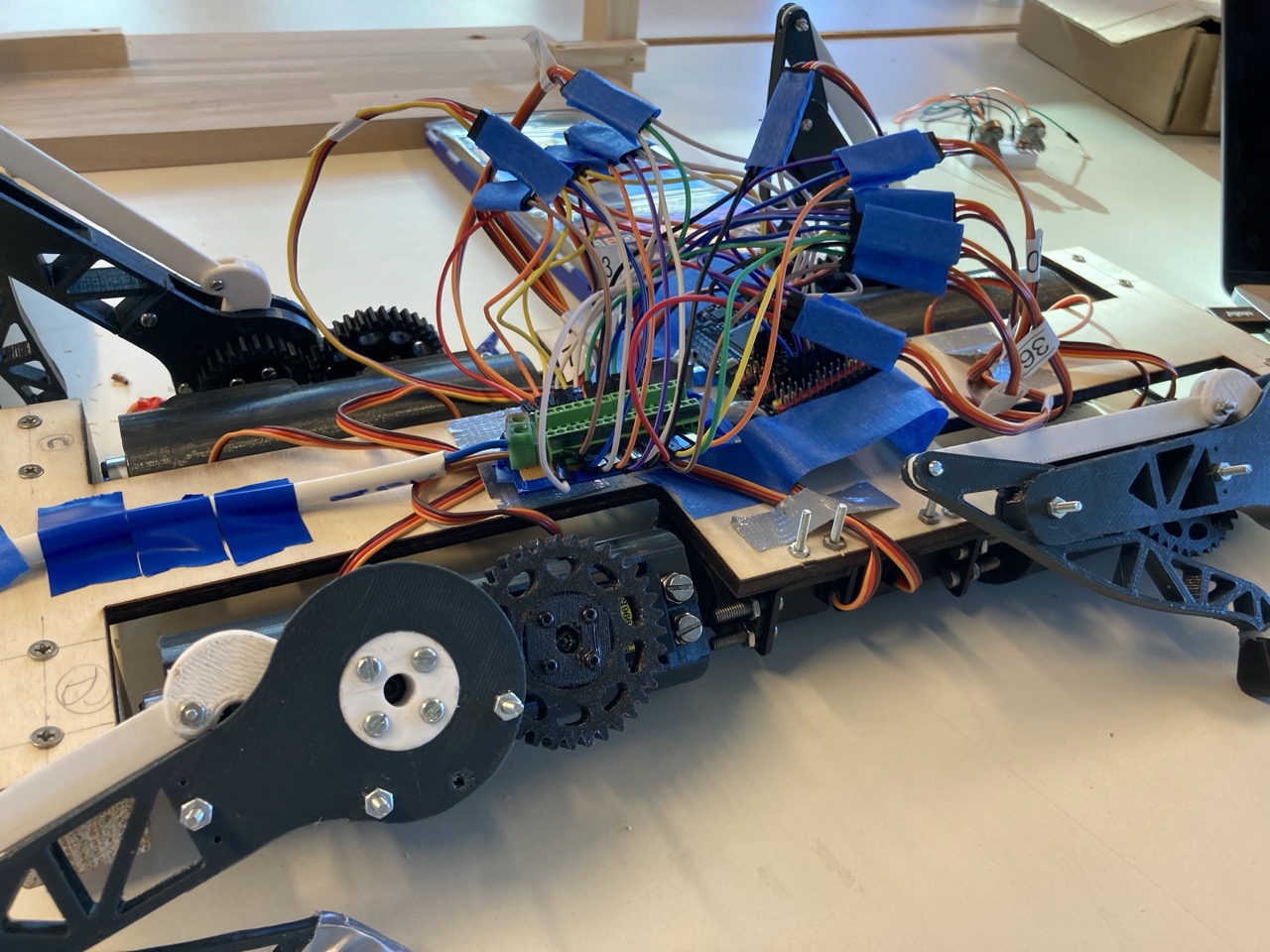
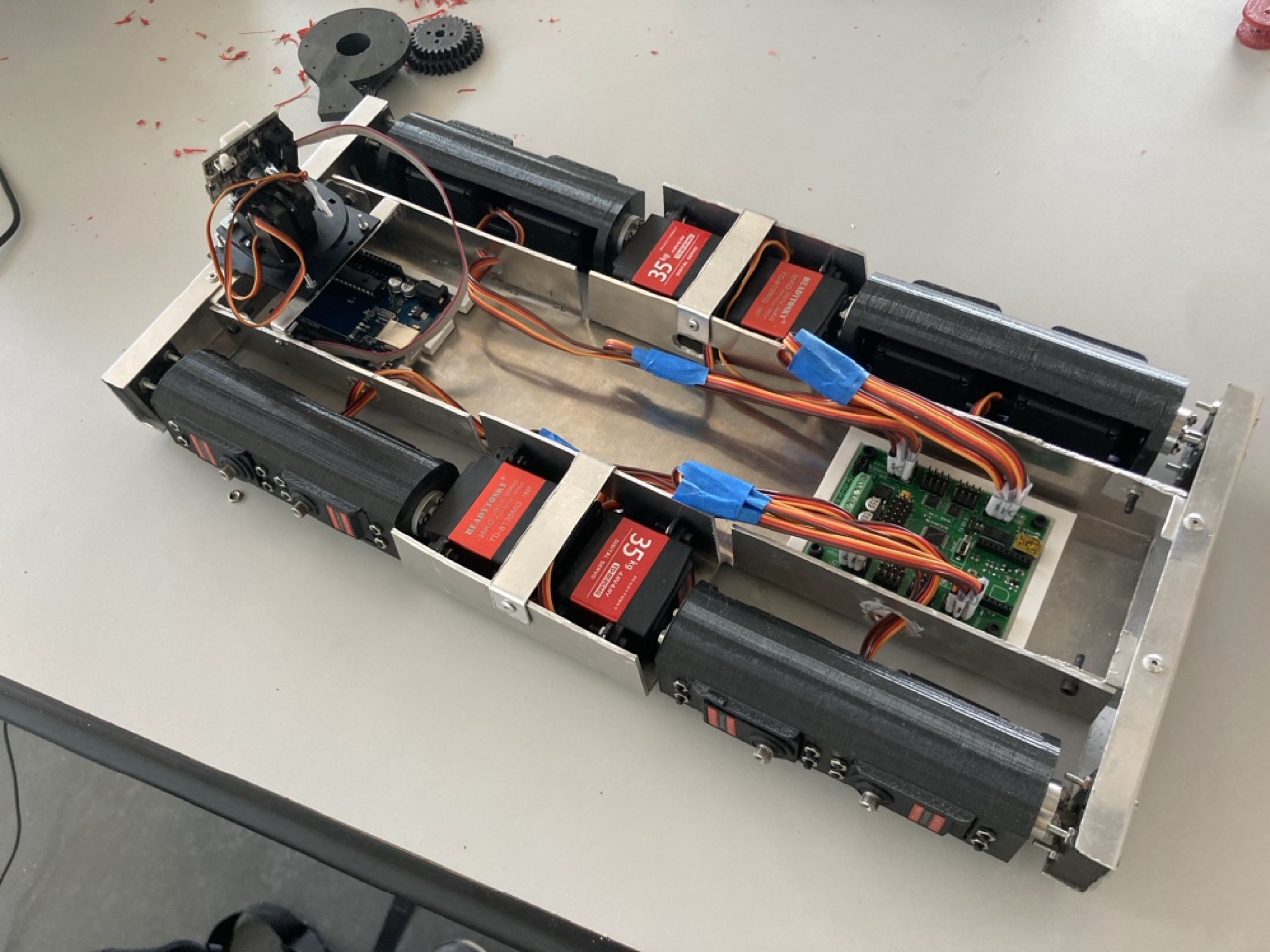
Le circuit n’était pas très complexe en soi, c’était juste le même câblage moteur répété 12 fois.
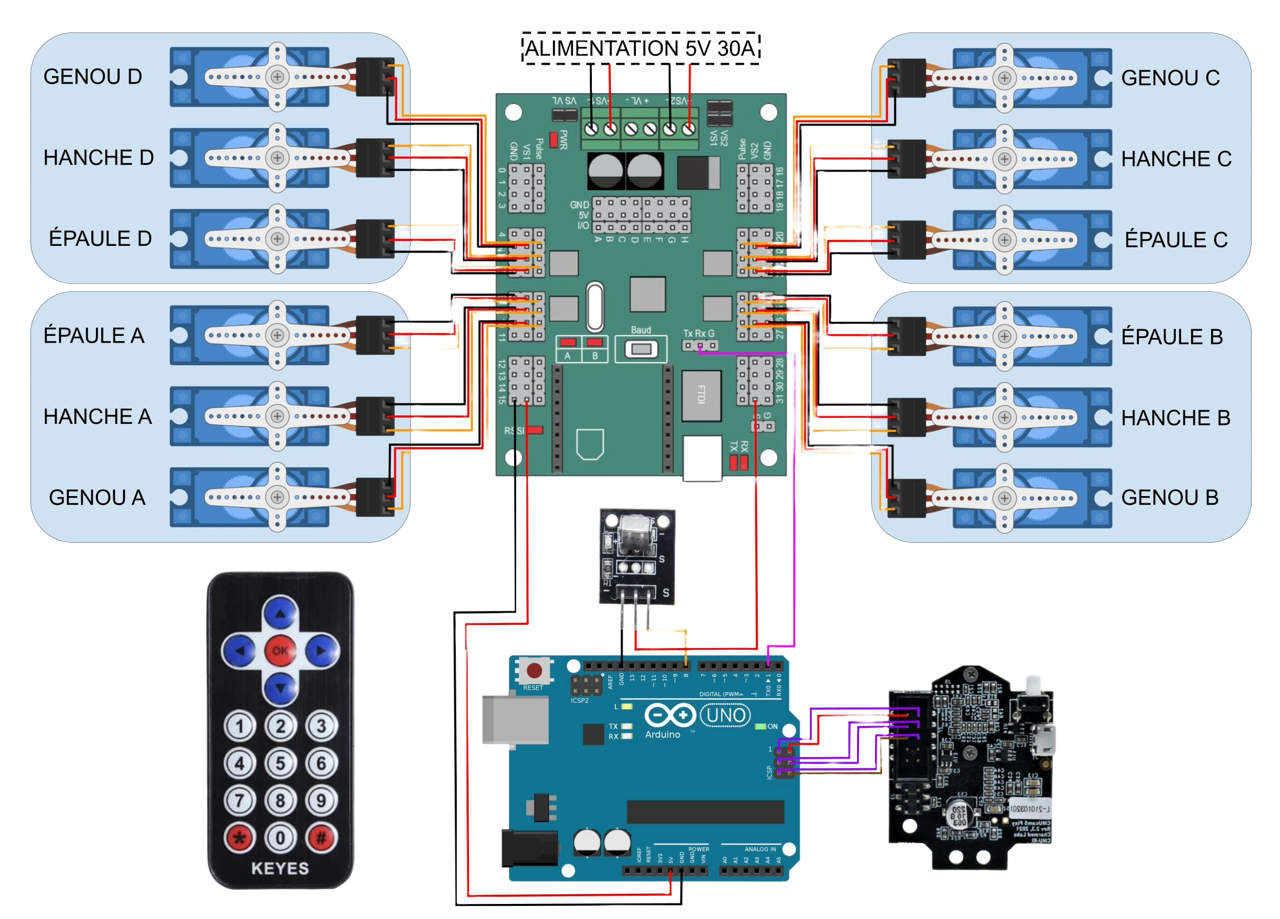
Mais ça a vite dégénéré.
Applaudissements pour : le robot spaghetti sur trois PCB empilés !

Ok. On a un robot. Et maintenant ?
Mais comment on fait marcher ce truc ?
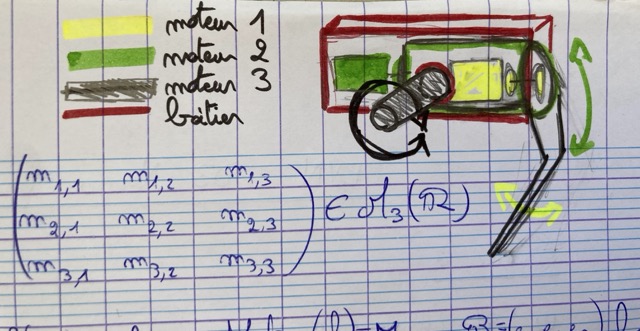
On a commencé par observer la nature et la démarche des chiens.
Ce qui pourrait donner ça sur notre robot :
On a ensuite fait ça à la bourrin : mesurer les angles des moteurs pour placer la patte au bon endroit, puis interpoler entre ces angles.
En code, ça donne ça :
On a eu pas mal de galères avant d’arriver à un résultat stable, en voici quelques-unes :
Mais à force d’essais et d’erreurs, on a fini par le faire marcher !
Oui, la vidéo a l’air d’avoir 20 ans, mais impossible de retrouver l’originale.
Oui, la laisse c’est le câble d’alimentation.
Je n’aurais jamais cru dire : « Je pars promener mon chien robot ! »

On a continué à l’améliorer petit à petit, ce qui n’a pas arrangé la situation des câbles spaghetti…
PolyDog v2
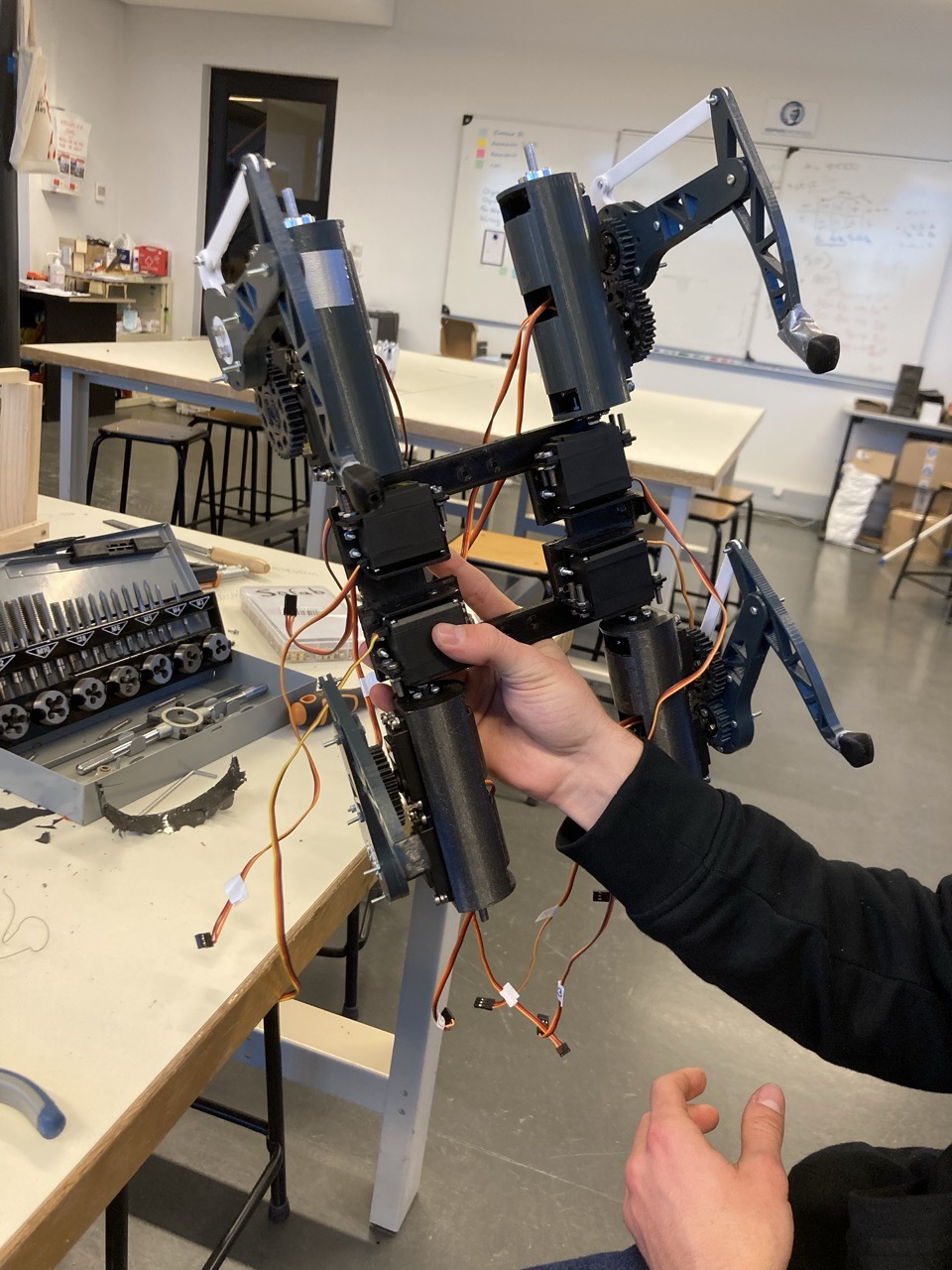
Après quelques itérations, des nuits à déboguer du code ou de l’électronique et à se cogner la tête contre les murs, on s’est dit qu’il était temps de faire un nouveau corps !
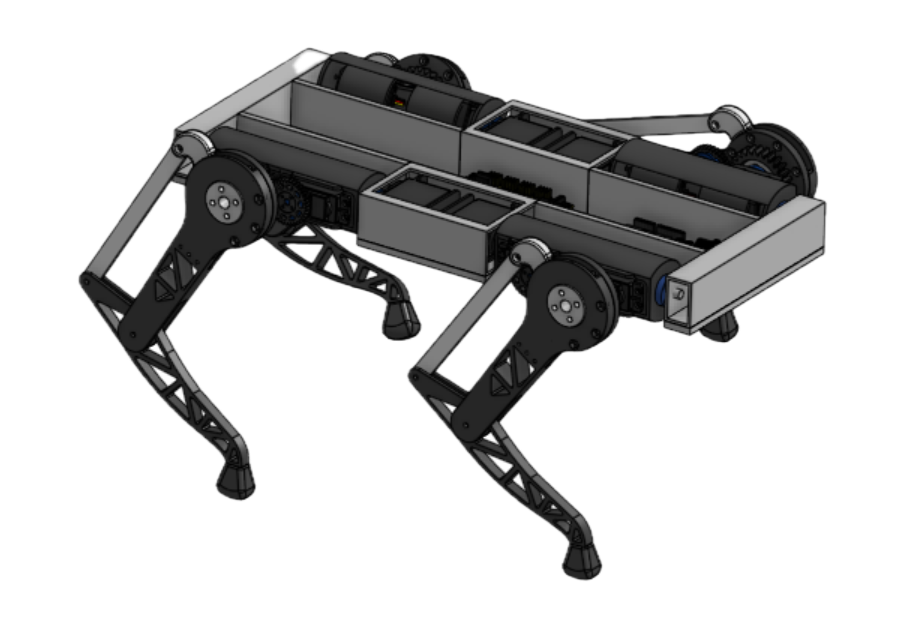
Ce qu’on n’avait pas anticipé, c’est que la version modélisée en 3D serait BEAUCOUP plus lourde que prévu.
Nouveaux problèmes à l’horizon…
Mais il a trop la classe !

Après beaucoup d’impression 3D, on a pu commencer l’assemblage.
À cause du poids en plus, notre robot plein d’énergie est devenu un papy.
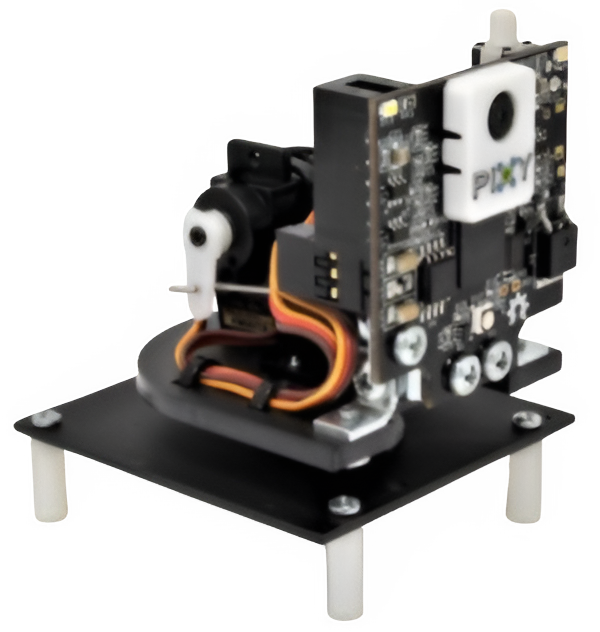
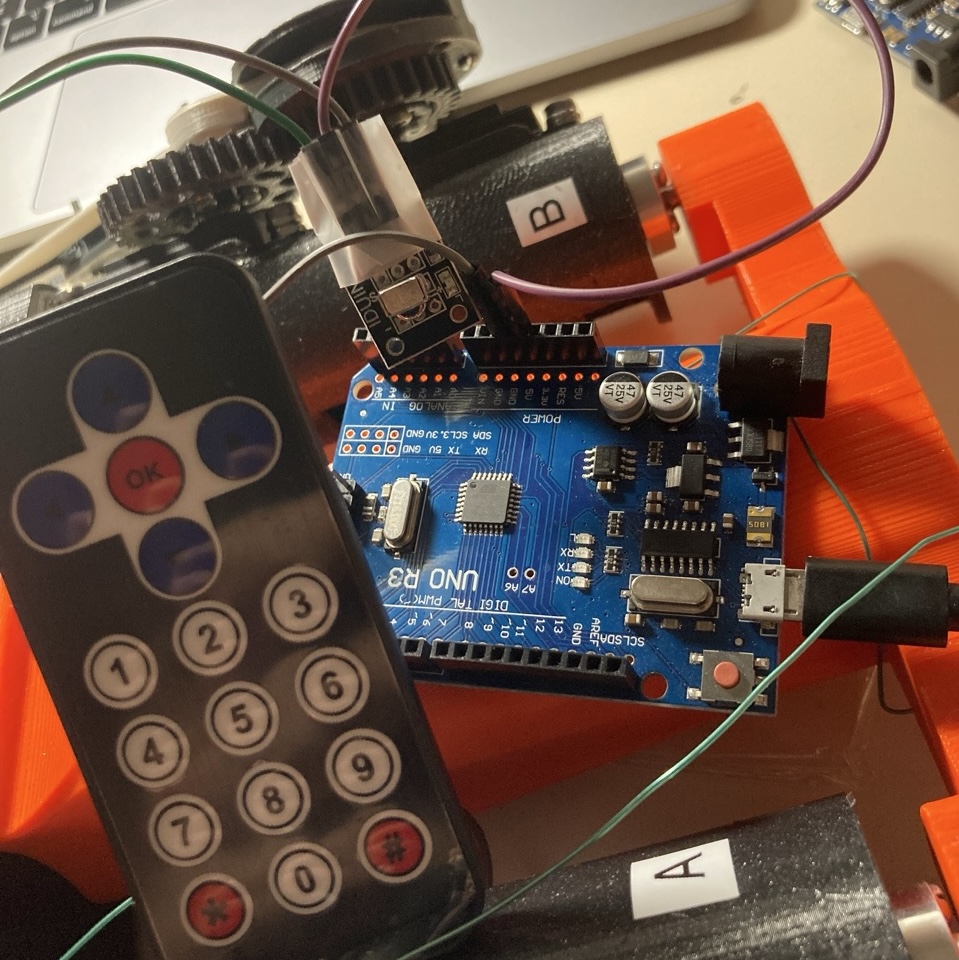
Pour le fun, on a ajouté une caméra et une télécommande.
La télécommande permettait de changer le mode du robot : marche, debout, gigote, etc.
Et la caméra, c’était pour s’amuser avec la vision par ordinateur. Le robot pouvait détecter un objet bleu devant lui et le suivre.
Malheureusement, je n’ai plus beaucoup de photos ou vidéos à partir de là. Aucune idée pourquoi.
Au moins, il me reste un artefact du setup d’atelier le plus avancé, digne de Tony Stark, c’est du jamais vu !
PolyDog v3
En essayant d’améliorer le robot, on s’est rendu compte que le poids était trop important pour les moteurs.
Il fallait un nouveau corps.
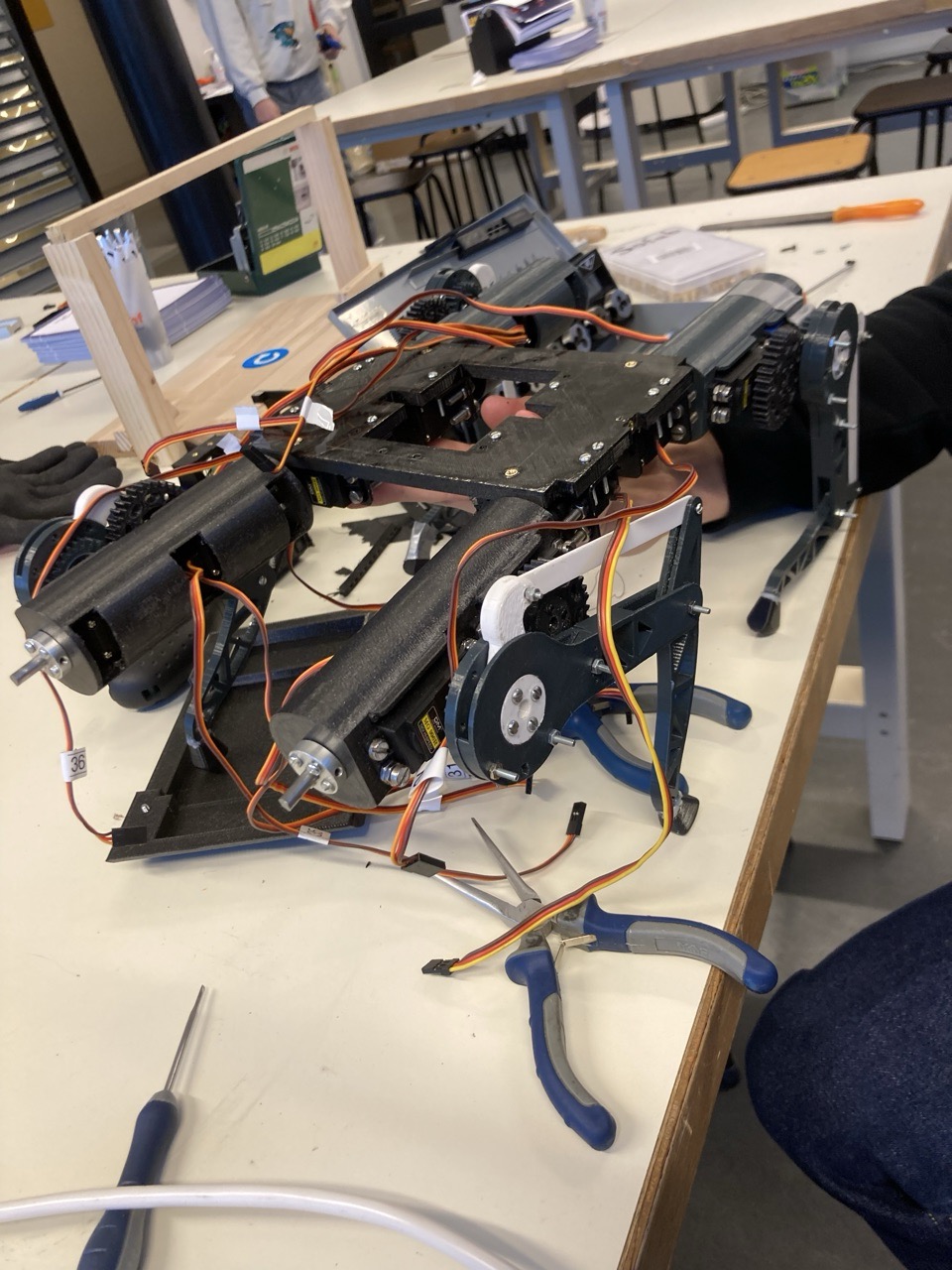
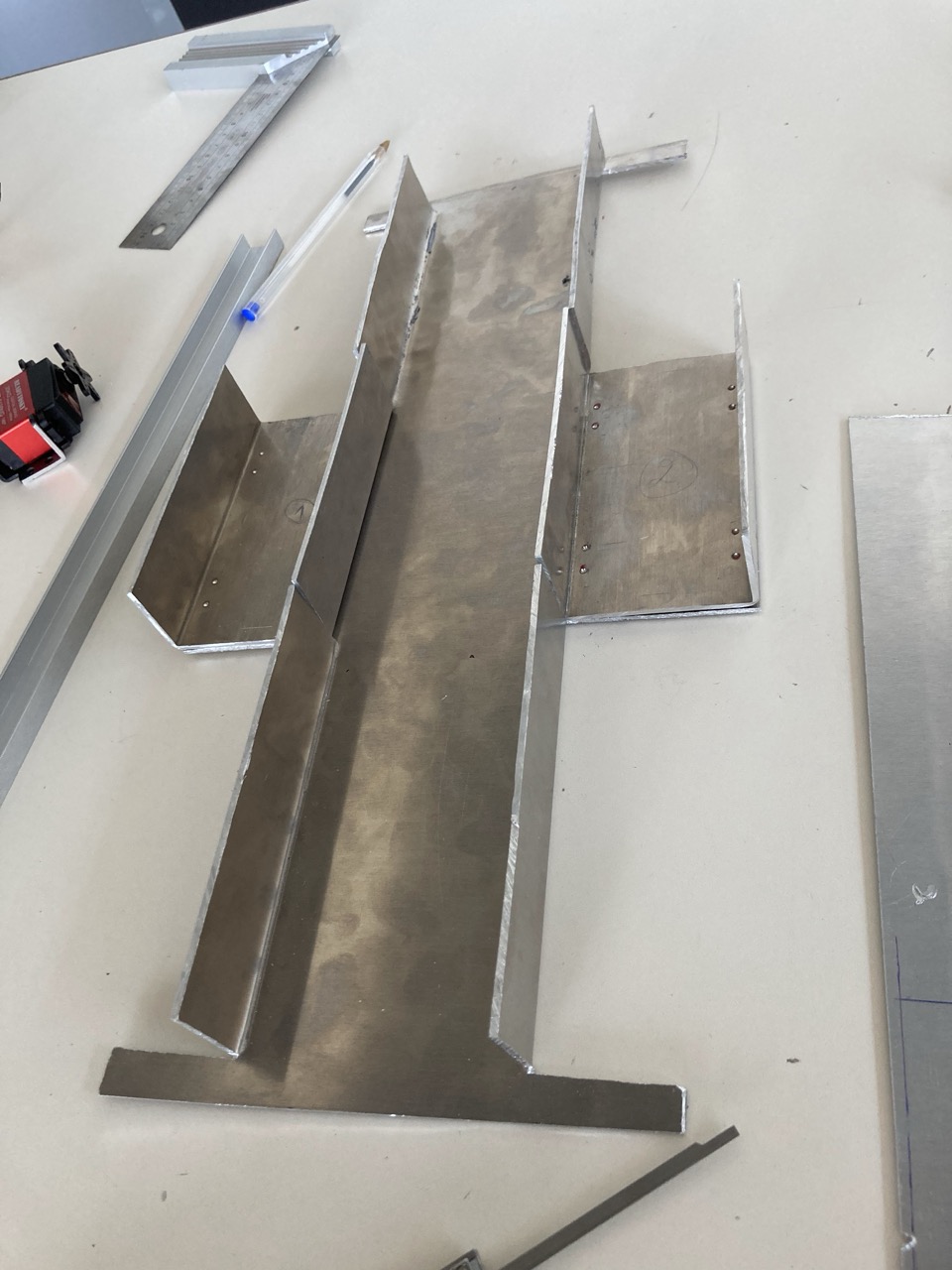
Parmi tous les matériaux de l’atelier, on est tombés sur des plaques d’aluminium fines et on a tenté le coup. Le but : alléger le robot (préfiguration…).
Retour à la planche à dessin !
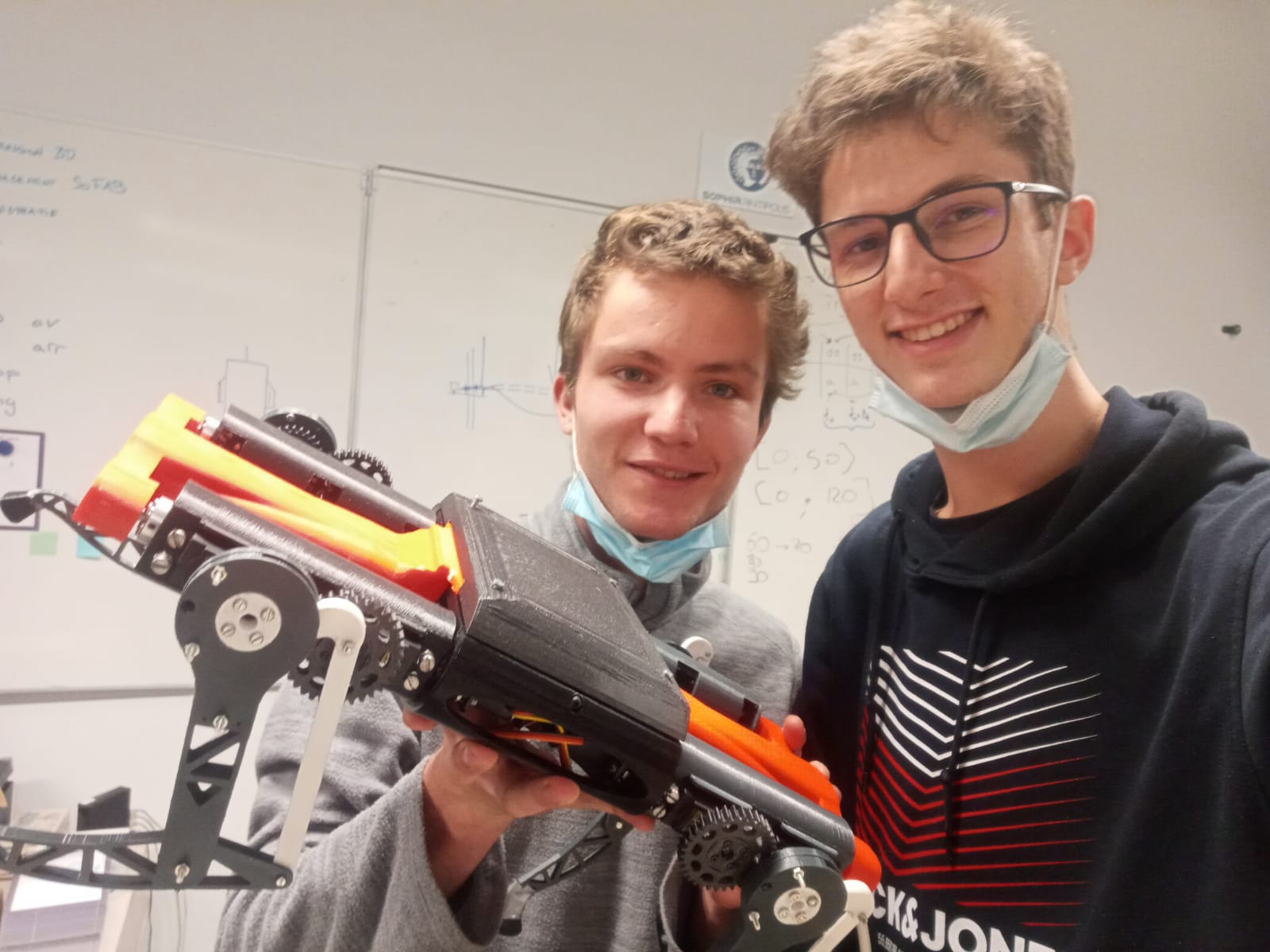
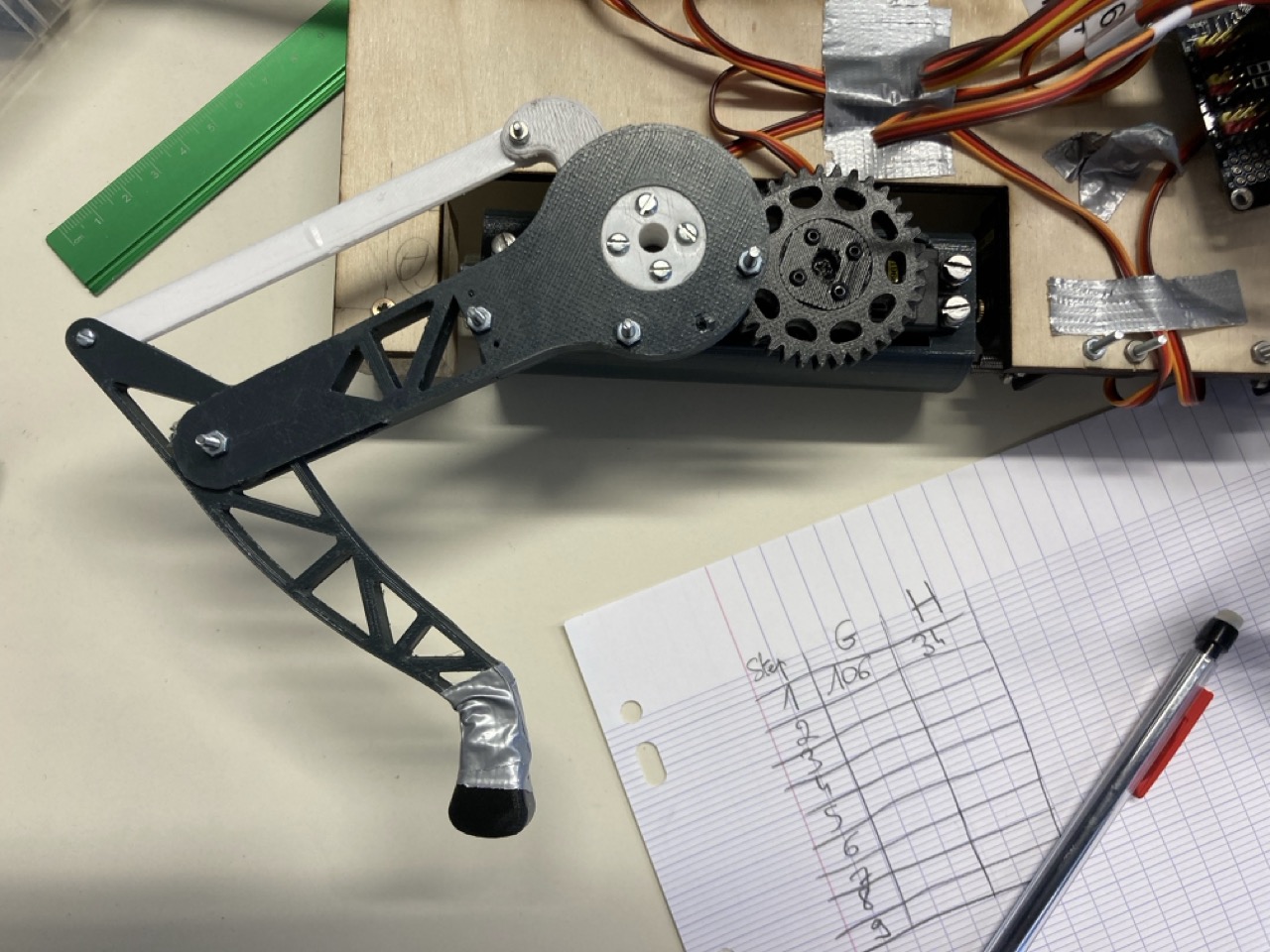
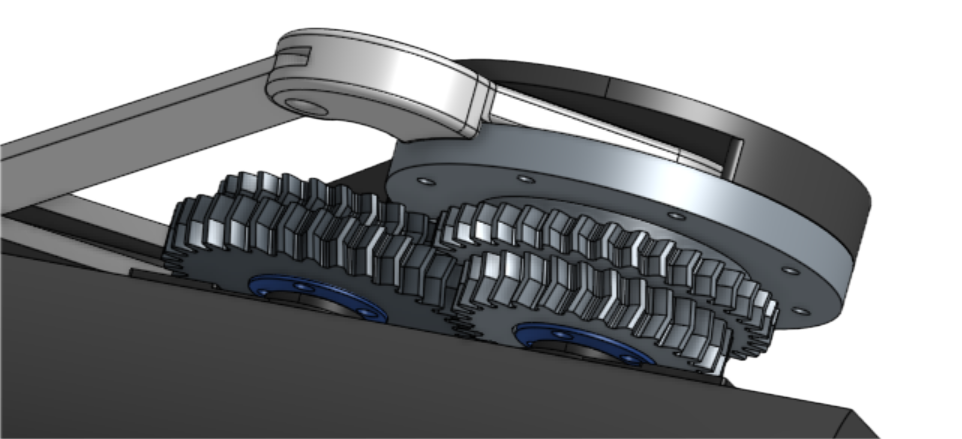
On a aussi repensé nos engrenages qui glissaient tout le temps et s’usaient très vite. En plus d’être stylés, les engrenages hélicoïdaux doubles sont bien plus stables et ne glissent plus.
Nouvelles compétences : découper l’alu, le plier, le riveter.

Voici une comparaison côte à côte des deux bêtes :
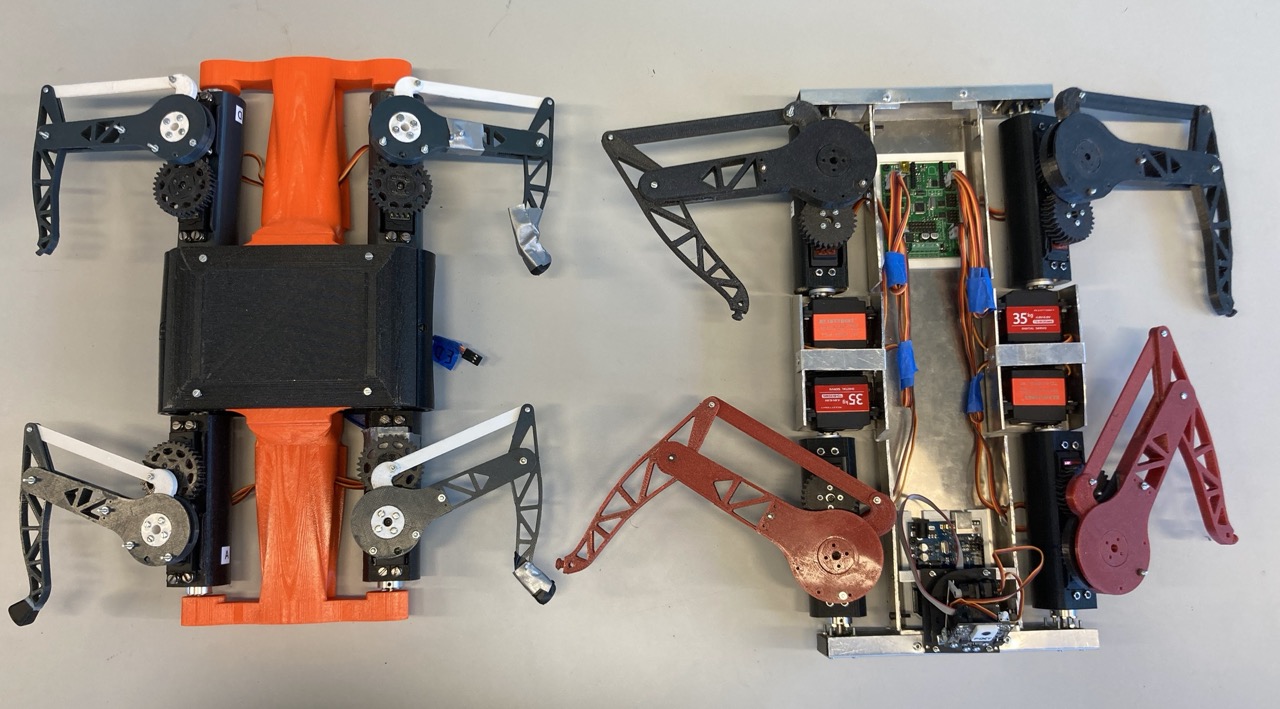
Changements évidents :
- Pattes plus grandes (pour plus de levier)
- Plus gros moteurs (pour plus de puissance)
- Gestion des câbles améliorée !!! (pour notre santé mentale déjà bien entamée)
Et le poids alors ?
Eh bien… la v3 finit à peine plus légère que la v2…
Mais bon, on se rapproche d’un IronDog !
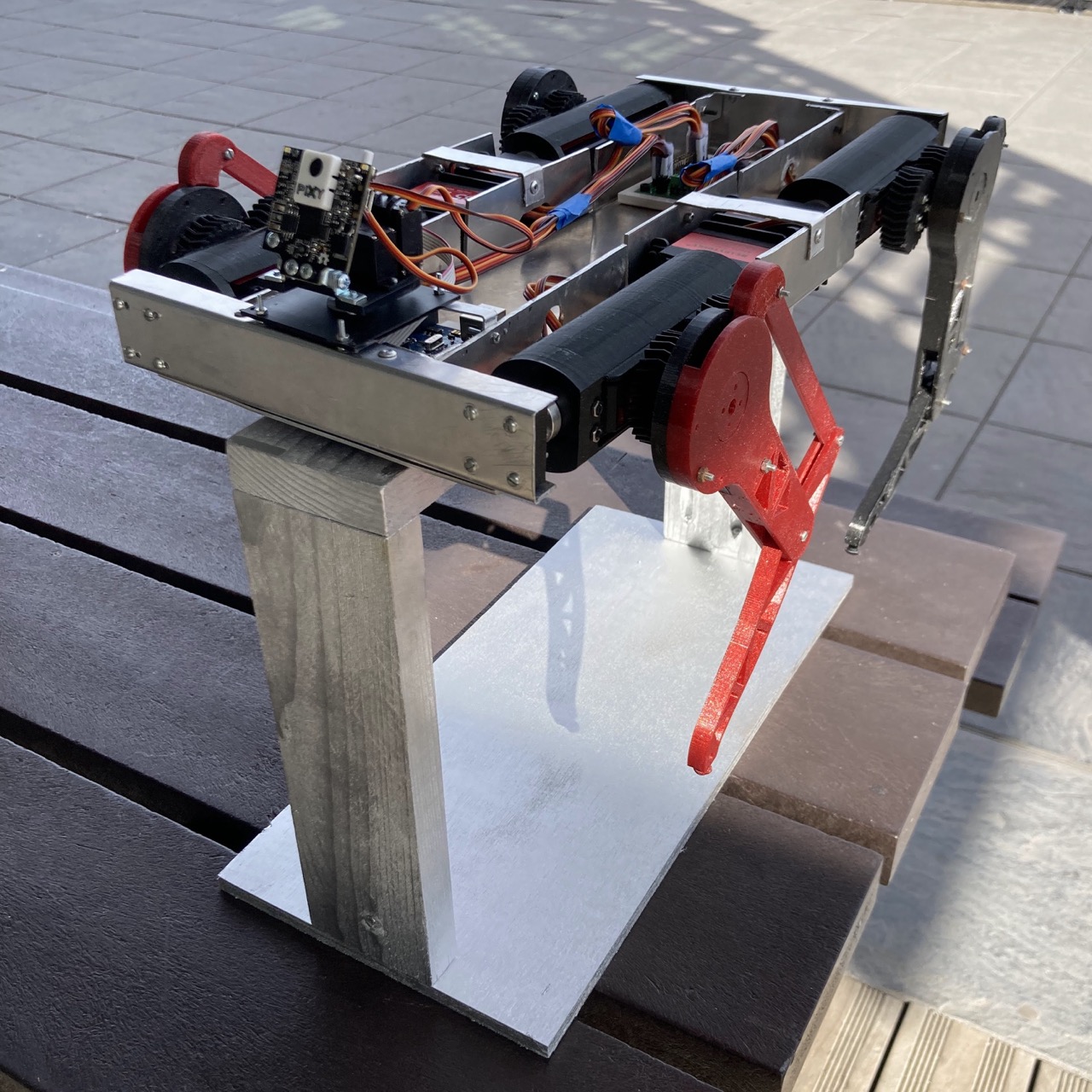
Encore une fois, aucune idée pourquoi je n’ai pas de vidéos de cette version en train de marcher, alors qu’elle était plus stable et rapide que la v2. On se contentera de cette photo où elle trône fièrement sur son support.
Remerciements
D’abord, au scotch Chatterton qui a tenu tous nos prototypes ensemble.

Plus sérieusement, merci à Xavier Lebreton, Fab Manager du FabLab Telecom Valley X Polytech Nice Sophia, pour son aide, ses idées et son soutien tout au long du projet.
Conclusion

Construire un robot, c’était génial même on s’y est cassé les dents et mis corps et âmes. J’espère avoir l’occasion de bosser sur des produits physiques un jour, c’est tellement gratifiant de les voir prendre vie.
J’allais oublier le meilleur : bidouiller avec des outils trop cools dans des labos trop cools !
Hugo a continué le projet avec Younes Bazi dans le cadre de leur cursus en robotique. Ils ont fait de super améliorations visibles dans cette vidéo, notamment grâce à l’apprentissage par renforcement en simulation.